






Механизм управления крылом
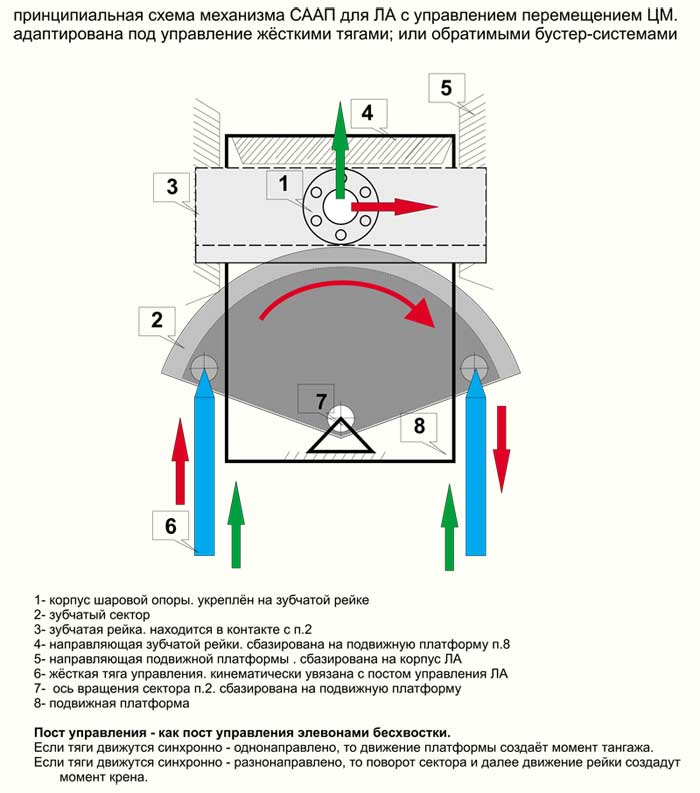
Были созданы два типа механизма. Для управления жёсткими тягами и возможностью применения бустер - систем; и для управления тросовой проводкой. Обе схемы признаны изобретениями и получили государственные патенты РФ.
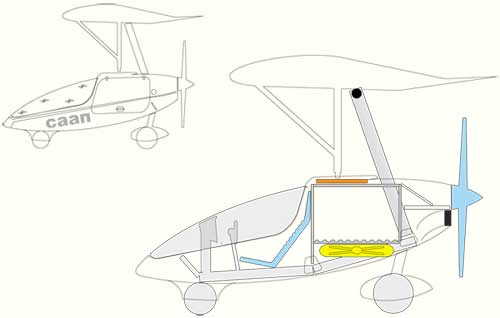
Как работают обе схемы, не требуют особых пояснений, из изображений легко понять принципы их работы. Стоит обратить внимание на само соединение механизма со стойкой крыла. На поперечной зубчатой рейке находится корпус шаровой опоры. А в стойке крыла , в нижней части, находится втулка скольжения. Из корпуса шаровой опоры выходит рычаг, имеющий свободу углового вращения в шаровой опоре. Рычаг с одного конца имеет собственно шар, вставленный в корпус шаровой опоры, а цилиндрическая часть рычага ходит по скользящей посадке во втулке, находящейся в нижней части стойки крыла. Это видно на рисунке по принципу управления оным.
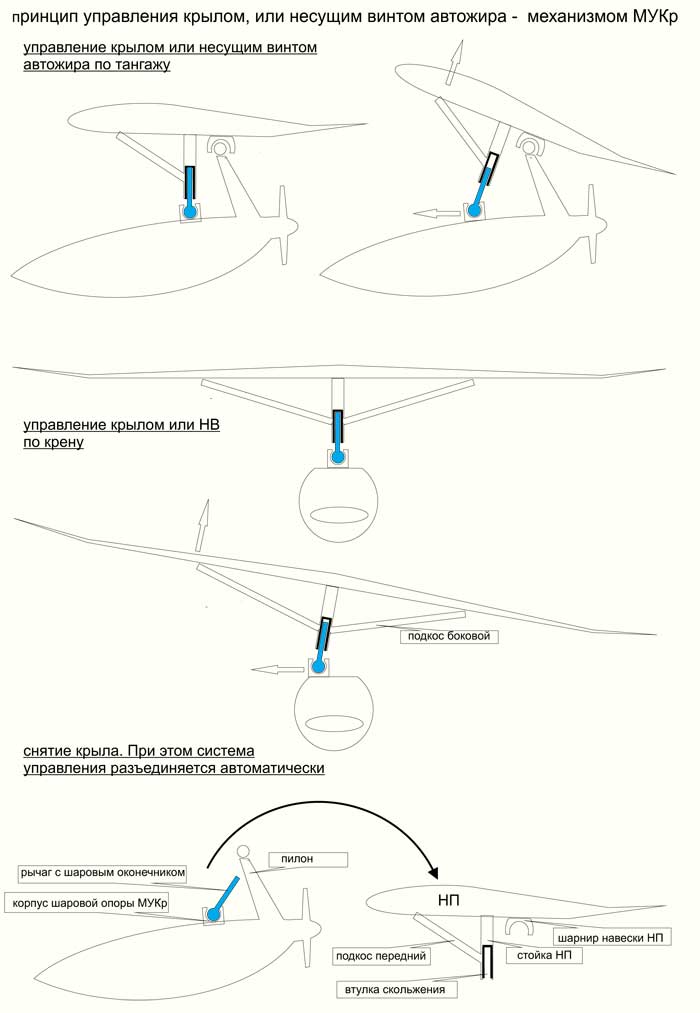
В итоге, при угловых вращениях крыла, расстояние между стойкой и шаровой опорой – меняется. Напомним, что точка центра грифа ходит по условному шаровому сегменту (представьте мысленно…),а скользящая посадка рычага и компенсирует это изменение. В итоге, в любом угловом положении крыла, сам МУКр находится в постоянном контакте с крылом. Чем и достигается управление ЛА(летательного аппарата). А когда необходимо снять крыло, то просто сначала снимается силовой болт шарнира навески крыла и уже потом само крыло просто снимается с ЛА. Рычаг выходит из стойки крыла и остаётся в шаровой опоре самого МУКр, то есть система управления совершенно не трогается и всегда кинематически стабильна.
Сам МУКр имеет малую строительную высоту, расположен на верхней части гондолы МДП, связан с постом управления пилота жёсткими тягами или тросовой проводкой. МУКр, адаптированный под жёсткие тяги, может быть оборудован бустер - системой. Хочется обратить особое внимание на тот факт, сам МУКр не диктует коренное изменение самих крыльев. Будь то гибкое крыло или же «жёсткокрыльного» типа. Просто вместо классической трапеции ставится трубчатая (профилированная) вертикальная стойка, имеющая в нижней части возможность установки втулки скольжения. А вместо верхних и нижних тросовых растяжек, применить только нижние три или четыре профилированных жёстких подкоса, в зависимости от конструктива крыла и пилонов. Которые связывают в статически определённую систему - саму стойку с каркасом крыла. Для свободнонесущего крыла возможно применение всего одной силовой . профилированной стойки управления. Управляющие усилия передаются по оптимальной цепочке: штурвал – МУКр – стойка (вместо трапеции), что позволяет сохранять привычный конструктив каркаса крыла дельталёта практически без изменений, что немаловажно для производственников. Данный механизм, с успехом может применяться и на автожирах, для управления несущим винтом.
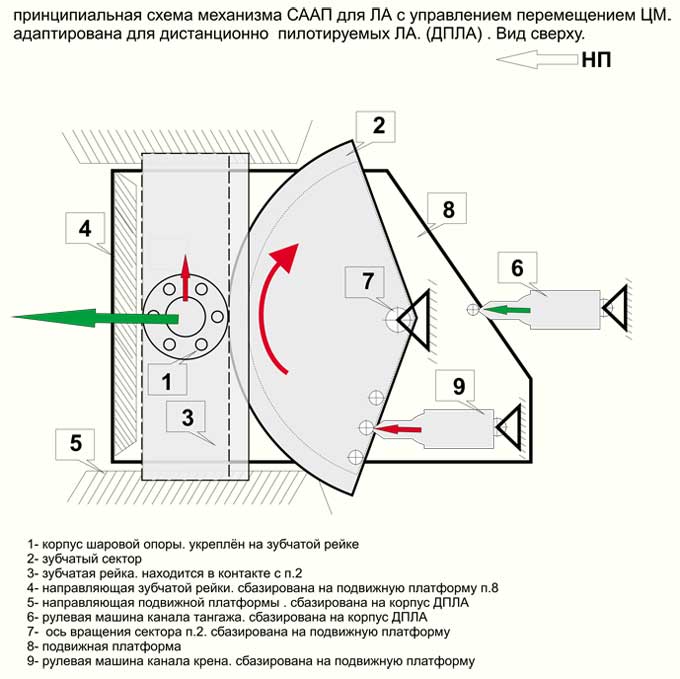
МУКр ( описание с патента)
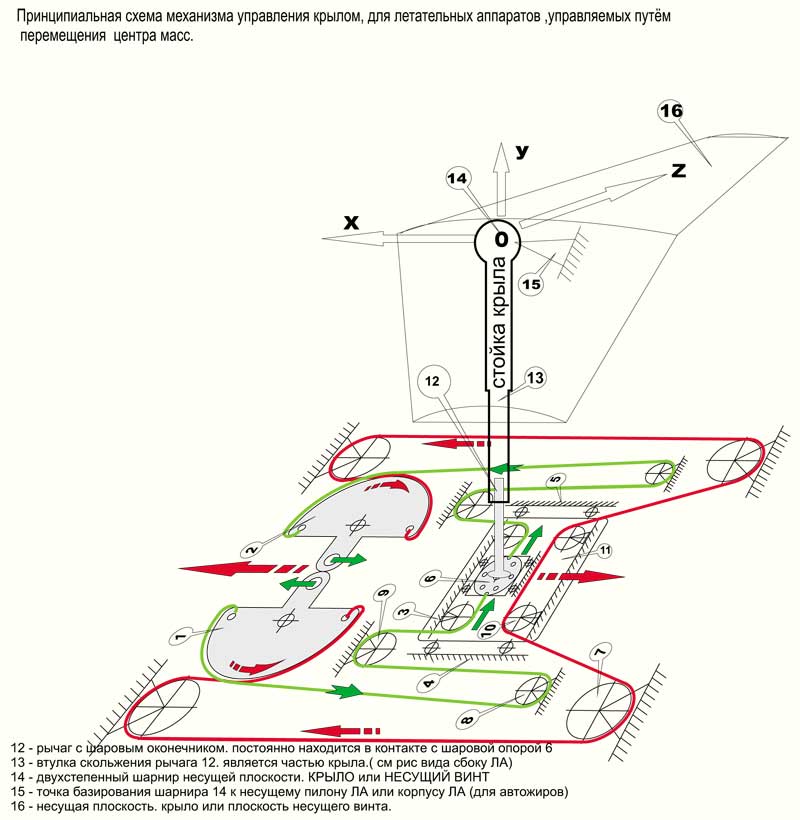
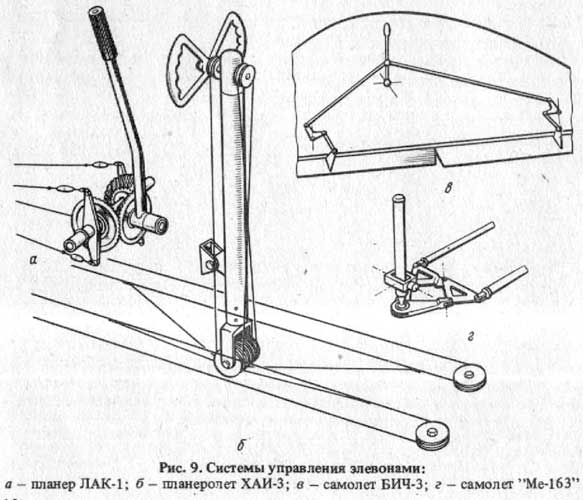
Основными узлами и деталями механизма являются:- Тросовые секторы поста управления (1, 2), установленные на общей оси,(условно показанные на схеме в одной плоскости), которая в свою очередь ориентирована по оси OZ. При этом сами секторы связаны механически между собой по типу поста управления элевонами (как на самолетах - бесхвостках с аэродинамическим управлением).
- Продольно-подвижная часть механизма (3), относящаяся к самому механизму.
- Продольные направляющие (4, 5), защемлённые на гондоле ЛА.
- Поперечно-подвижное основание шаровой опоры (6).
- Неподвижные опоры тросовых роликов (7, 8, 9), относящиеся к гондоле ЛА.
- Ролики тросовые продольно-подвижной части механизма (10), относящиеся к узлу (3).
- Крыло или несущий винт ЛА (11).
- Рычаг с шаровой законцовкой (12). Нижняя шаровая законцовка состыкована с шаровой опорой (6), а верхняя состыкована соосно с втулкой (13) по скользящей посадке.
-втулка управления крылом (13) защемлённая на крыле ЛА .
-двустепенный несущий шарнир крыла (14), позволяющий поворачиваться крылу или плоскости вращения несущего винта по оси ОХ и OZ.
При синхронном и однонаправленном вращении тросовых секторов (1,2), наружный замкнутый трос приводит в продольное движение узел (3), скользящий по направляющим (4, 5). При этом, шаровая опора (6), через рычаг (12) и втулку (13) поворачивает крыло вокруг оси OZ.
При синхронном разнонаправленном вращении тросовых секторов – внутренний замкнутый трос приводит в поперечное движение шаровую опору (6), которая через рычаг (12) и втулку (13) поворачивает крыло вокруг оси OX.
Если тросовые сектора, расположенные на одной общей оси повернуть в одну – однонаправленную сторону, но не синхронно, то часть механизма (3) и шаровая опора (6) придут в одновременное движение. При этом крыло совершит одновременный поворот вокруг осей OZ и OX.
Управление тросовыми секторами, расположенными на одной общей оси, осуществляется стандартным постом управления, таким как применяется в самолетах бесхвостках для управления элевонами.
Применение в БПЛА
Сейчас появилась
тенденция к широкому развитию БПЛА для нужд
сельского
хозяйства; мониторинга в различных областях применения; для нужд
военного ведомства и в сфере МВД и т.п.
Имеющиеся БПЛА, в основной
своей массе имеют классическую аэродинамическую компоновку, либо
компоновки близкими к тандемным. Как известно, современные БПЛА
создаются или как ЛА - узкоспециализированные по тактико-техническому
заданию (ТТЗ); либо имеющие более широкий спектр применения -
«многофункциональные ЛА». При изменении массы целевой нагрузки (ЦН) –
меняются и лётно-технические характеристики (ЛТХ), такие как диапазоны
скоростей, скороподъёмность, потолок. При неизменной силовой установке
и площади крыла, изменение массы ЦН может и отрицательно сказаться на
выполнении задачи, что частично снижает «универсальность» БПЛА.
Это заставляет увеличить кол-во типов БПЛА по массе
допустимой ЦН.
Например, БПЛА адаптированный на средневысотный мониторинг будет
малоэффективен при высотной аэрофотосъёмке, или же загрузке именно
данного БПЛА - боевой ЦН.
Известно, что имеющиеся БПЛА имеют не
изменяющуюся площадь крыла, будь то классика или же тандем. Обеспечение
устойчивости в канале тангажа, осуществляется стабилизирующимися
поверхностями - горизонтального оперения или переднего горизонтального
оперения. Либо определённым взаиморасположением крыльев тандема. А
увеличение подъёмной силы достигается изменением кривизны профиля
крыла. Стоит отметить, что изменить площадь крыла непросто, так как
крыло и стабилизирующие плоскости строго
взаимоувязаны и площадями и плечами статики.
И вот тут-то и может
оказаться весьма перспективным БПЛА – СААП с МУКр
Представим себе, что
имеется определённый модуль, типа гондолы. К этому модулю прилагается
2-3 вида крыла, имеющих разную площадь (или профиль, по требованию к
числу Re). И в зависимости от типа; массы; назначения ЦН, от требуемого
эшелона выполнения задачи; нужное крыло просто ставится взамен
предыдущего, и при том весьма оперативно, ведь крыло связано с МУКр
через простую скользящую втулку, получается БПЛА «универсал».
Такой БПЛА можно доставлять к месту старта и, в
зависимости
от
поставленной задачи, простым движением устанавливать нужное крыло. А
сама конструкция МУКр, позволяет элементарно интегрировать в схему и
рулевые машинки (это хорошо видно из рисунков). Получив недорогой,
двухканальный (а не трёх!), механизм управления, что особенно очень
удобно (с точки зрения оператора), для дистанционно пилотируемых
летательных аппаратов.
В итоге, симбиоз гондолы-модуля, МУКр, и
быстросменных крыльев, дают
возможность развития нового направления в классе «универсальных» БПЛА –
бесхвосток. И немаловажно то, что данный вид бесхвостки имеет большую,
чем у классики, весовую отдачу, компактнее и дешевле.
Компановка СЛА с МУКр
Опубликованно для всех кому интересно решение проблем закрытых кабин МДП, а также проектированию БПЛА. Если понравился МУКр, можете брать на вооружение бесплатно, по данному вопросу можете написать, ниже адрес почты